Designing a Tool that would procedurally generate different kinds of rigs for a similar purpose but with slight different functionality for alternative limbs was a fun task that i took on and felt very engaged with.
I did research on joint chains for alternative limbs and decided which types of rigs would be suitable for generating tails, trunks, tentacles, plaits, cables and any other kinds of joint chains.
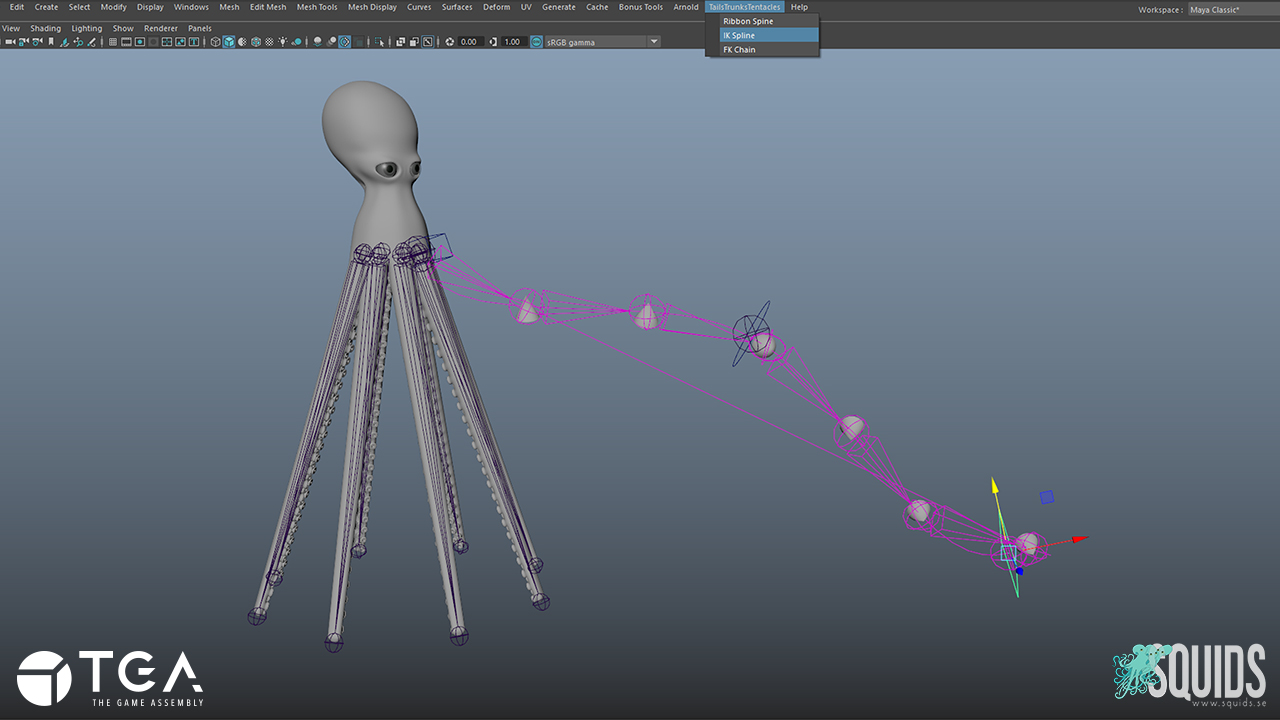
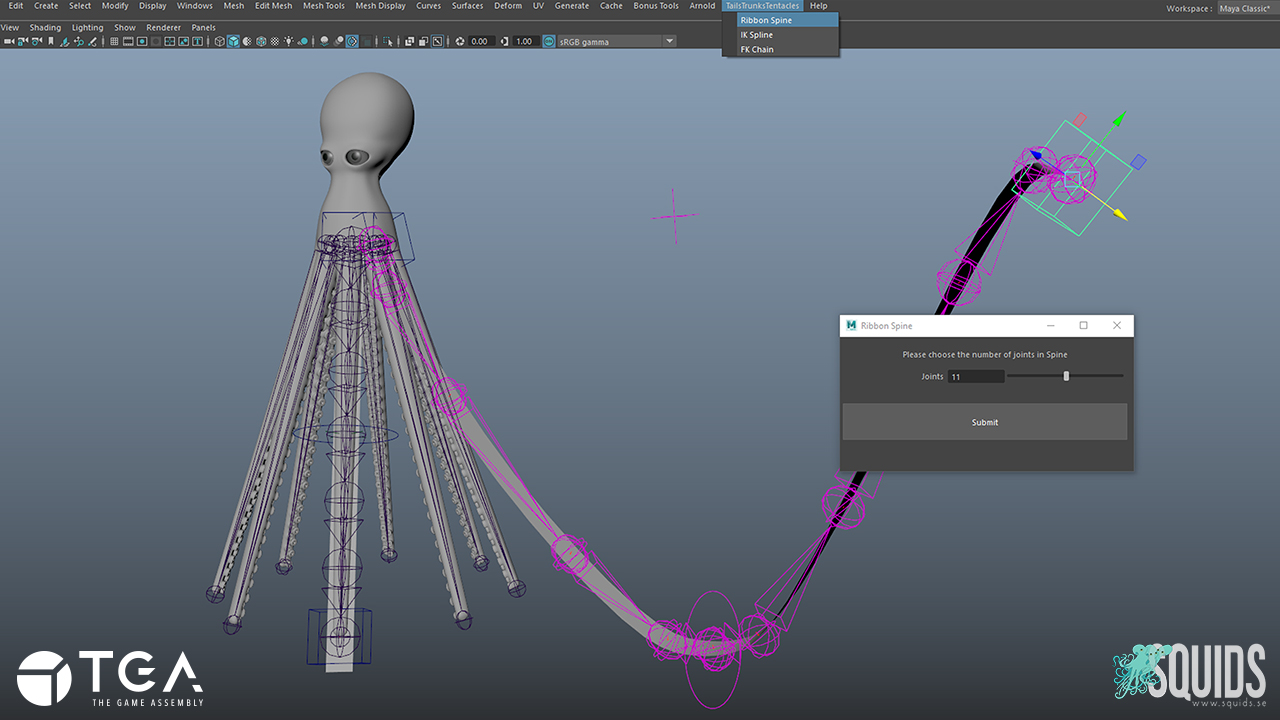
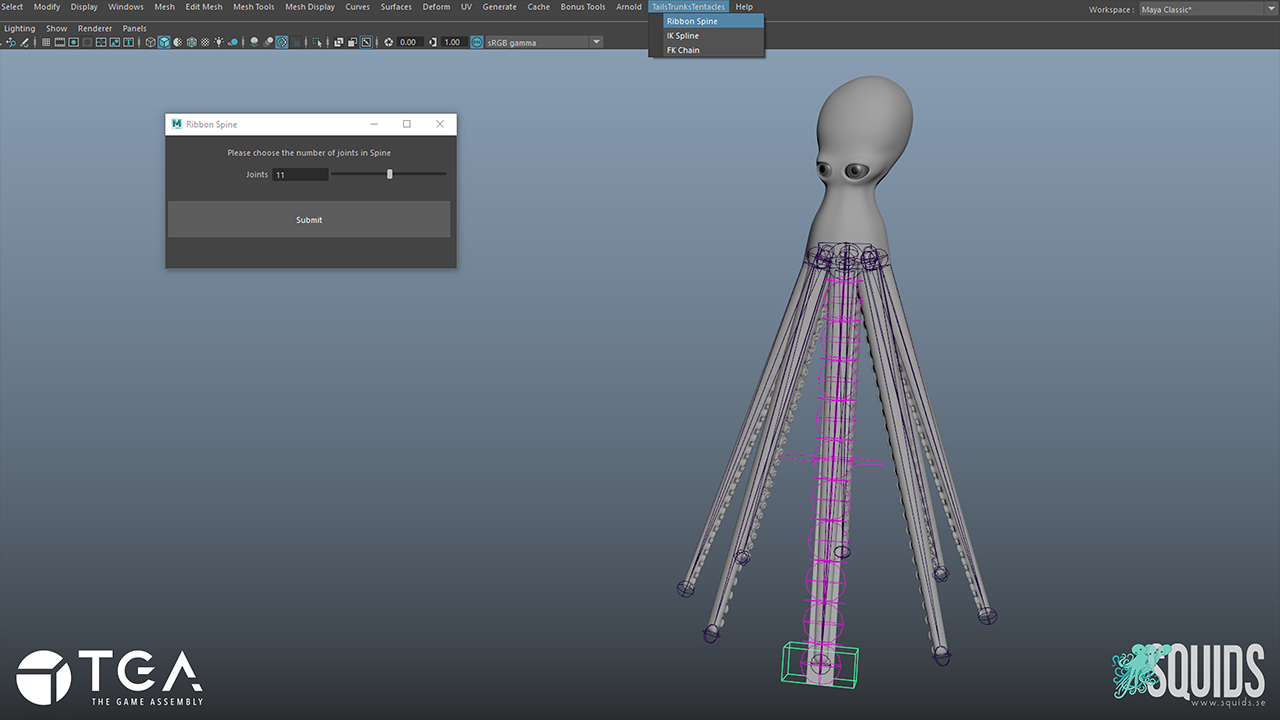
In this tool the user can easily generate an ik-spline, a ribbon spine or an fk chain set up. By selecting two positions (joints), the tool prompts the user to choose how many joints are needed in the chain. The controls that can be adjusted according to preferred size and shape. The tool creates and orients the joints according to rigging standards. Even an extra set of joints for skinning is automatically generated to the Fk-chains, ik-splines and ribbon Spine setups.
I also looked at different variable fk rigs with calculations for how the middle control could influence the joints chain with attributes that can manipulate the chain was Research that was never included in the tool it self, but prepared me for the next rigging project that i had ahead of me.
The workflow... The code in python was later with modifiations, very helpful in the process of testing the rig solutions for all the cables in the drone rig.